

The content of this piece first appeared on TomTom’s Behind the Map Blog, and we are thankful for the opportunity to share it here with their consent. Full acknowledgment goes to Matthew Beedham for authoring the original work. Additional credit goes to Pascal Clarysse and Siavash Shakeri. To explore the initial publication, please visit the original article on their blog here.
![]() Transport infrastructure is a central feature of any map. So, it’s no surprise the Overture Foundation, with the exclusive help of TomTom, is developing its own data set of the world’s roads – what it calls its transportation layer. We looked at what TomTom is doing to create the Overture transportation layer and what it means for the project.
Transport infrastructure is a central feature of any map. So, it’s no surprise the Overture Foundation, with the exclusive help of TomTom, is developing its own data set of the world’s roads – what it calls its transportation layer. We looked at what TomTom is doing to create the Overture transportation layer and what it means for the project.
Pascal Clarysse, TomTom VP Engineering Maps, is responsible for various data layers in TomTom’s new map, TomTom Orbis Maps — particularly those related to routing. Due to his expertise in this area, he’s also representing TomTom as part of the Overture Maps Foundation and providing his skills to validate, quality control and process open map data to build the Overture transportation layer.
“One of the goals of Overture is to create the most complete and consistent representation of the world’s road network” Clarysse says. “So, we’re [TomTom] using our expertise to build Overture’s base level map of the world’s road network and ensure that it’s stable, scalable and consistent, and allows us to add more data to it over time to make it as complete as possible.” In practice, doing this takes quite a few steps.
[If you want to learn more about the Overture Maps Foundation, the open map data project co-founded by TomTom, AWS, Meta and Microsoft, check out this article.]
“To make the transportation layer we take open data, which is mostly OpenStreetMap (OSM) at this point, and manipulate it to meet Overture’s requirements,” Clarysse explains.
“We quality check the OSM data to make sure it’s consistent according to Overture’s specification, we segment the road network using a consistent logic for the whole world, and then remap all the relevant road attributes that we know about from the open data to the new map,” he adds.

A map is complex, it’s built up from many layers, many data sources and compiles information about many attributes into one place. But central to any map, in the modern world, are roads, footpaths and other travel infrastructure — what’s called the transportation layer.
A map is complex, it’s built up from many layers, many data sources and compiles information about many attributes into one place. But central to any map, in the modern world, are roads, footpaths and other travel infrastructure — what’s called the transportation layer.
To ensure the data is complete, TomTom will process and add other open data to the Overture transportation layer in future releases. Combining data from many sources into one transportation layer to create a map dataset that’s stable, rich in detail and highly accurate but, to consumers, “looks and acts as if data is all coming from one source,” Clarysse says.
Sectioning roads for stability and scalability
“A large portion of the work we do is to section the road network, make it consistent across the globe, stabilize it and make it ready for large-scale commercial use,” Clarysse says.
Sectioning or segmenting the road network is important as it creates the foundation for how information (attributes) about the roads is attached to the map — sections can contain information about road surfaces, speed limits, and the number of lanes. Understanding how all these sections link together is what allows location tech companies, like TomTom, to build routing algorithms, detailed maps and other location-based services that help millions of drivers navigate the world’s roads.
The data model for OSM’s transportation layer splits the road based on attribute changes, using a technique called road sectioning.
Road sectioning is great for helping lots of people add lots of detail to a map as it simplifies the map editing process, and it helps with tracking version histories, both of which are great for projects like OSM. But it inhibits stability and scalability as it leads to excess data that changes too dramatically when edits are made.
Imagine driving from your home to the highway, you might pass from a 40 km/h limit, to a 50 km/h limit, on a two to four lane road, that’s asphalt and concrete. In road sectioning, each time one of these attributes changes a new section on the map would need to be created with its own unique identifier (ID), in this example there would be four IDs to account for all the different attributes.
When roads are split based on attribute changes, there are many IDs, IDs change frequently and roads must be re-sectioned if attributes change, this creates an unstable map. Each section is made up of a unique set of attributes, different from the one it connects to
When roads are split based on attribute changes, there are many IDs, IDs change frequently and roads must be re-sectioned if attributes change, this creates an unstable map. Each section is made up of a unique set of attributes, different from the one it connects to.
However, attributes of a road often change and any time this happens the road’s underlying sectioning is affected, which in turn also affects the ID. If a new speed limit were added to this section of road, it would create a new ID. See in the diagram what happens when a 30 km/h speed limit is introduced — ID #4 is deleted and two new sections (ID #5 and #6) are created to account for the new speed limit.
If another layer of attributes changes, like road surface, the road would require further sectioning and would be made up of many more discrete and unique subsections — in theory, a section of road could be infinitely segmented and have infinite IDs.
Every time a road is split on an attribute change, its original ID gets removed and the new section gets added with a new ID. Changing IDs make maps unreliable and it creates extra work for developers to account for these continual changes. Sectioning road networks like this creates lots of small segments, excess data, which impacts the performance of any product or service built on the map.
Consider a routing algorithm, performance would be poor because it must compute a lot of changes in data between sections to establish the shortest, fastest or most economical route.
However, to create the Overture transportation layer, Clarysse and his TomTom colleagues apply an intelligent segmentation (sectioning) model, called linear referencing. This method does not split roads by attribute changes but instead represents attributes based on their distance along an entire segment of road, greatly reducing the number of IDs and how often they change.
“Linear referencing precisely pinpoints attribute changes based on their location along linear features [in this case, roads]. This approach decouples a linear feature’s physical geometry from its attributes, preserving the continuous structure of the transportation network [road] while allowing for attribute variations.
Siavash Shakeri – Maps Product Manager
If you want to dive into the technical side of road sectioning and linear referencing, read Shakeri’s exploration here.
Linear referencing is the way forward
In crude terms, linear referencing allows TomTom to split roads up in a more natural way based on how we make decisions while travelling, splitting them up at junctions and intersections (decision points), and using these as their start and end locations. Attributes are then placed on the map based on their distance along these road sections. Doing so greatly reduces the total number of road sections and IDs required.
“Mapping in this way is more representative of the real world. When a speed limit on a road changes, you don’t see any physical changes to the geometry of the road, and you don’t call that part of the road something different,” Siavash Shakeri, Maps Product Manager says. “So, we map only what changes, not everything else too.”
“It means there are fewer sections, fewer IDs, and that IDs don’t change as often. This makes the map stable, consistent and scalable,” Clarysse adds.
Think of it this way, rather than mapping a road between two junctions (A and B) to have three sections based on its three discrete speed limits (like in the previous example), the road is one section starting at junction A and ending at junction B.
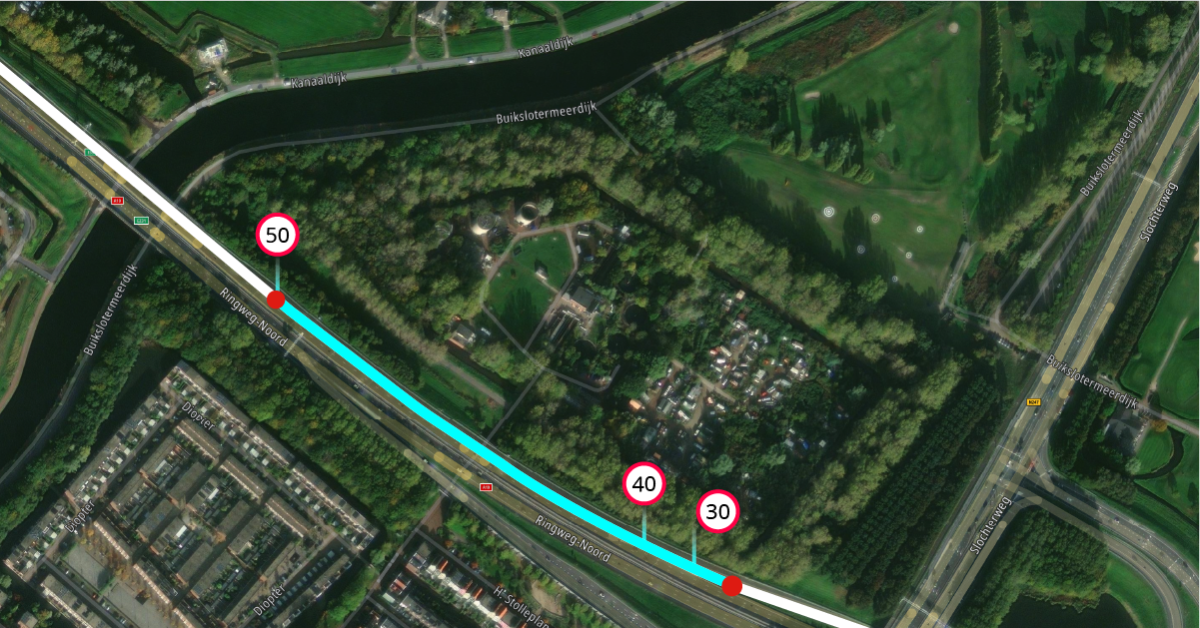
Attributes are then applied based on where they occur in terms of their distance along this road section — say between zero and 80% along the section it’s 50 km/h and between 80% and 100% along the section it’s 40 km/h. It’s still one section, one ID, with three speed attributes applied linearly along the section.
With linear referencing, attributes are attached to a segment of road based on where they fall, in terms of distance, along that road. The road has one ID, that stays the same when attributes change.
If local authorities change part of the road’s speed limit to 30 km/h between 95% and 100% along this road, the speed limit attributes are changed in terms of their distance along the segment to reflect this. The ID of the road and its segmentation are unaffected and the speed limit data remains highly accurate.
If this change occurred using road splitting, the entire road would need to be resegmented to align the new speed limits and maintain its three segments, as we saw in the first diagram. The IDs would change, and new segments with new IDs would be introduced. When you start adding more attribute dimensions, like road surface and number of lanes, ID changes and sections become even more complicated.
It’s easy to see how quickly this could get out of hand, when there’s a whole world of people and organizations adding unique data to a map.
“At some point, it just doesn’t scale well anymore. If everyone using the map adds things on top that require their own sectioning or segmenting, then it will not scale, and everyone would be fighting over the splitting, and how the roads are segmented,” Clarysse says.
Keeping it simple
Linear referencing makes map data easier to work with as road IDs don’t change that often and sections aren’t being rethought and realigned as attributes go through more frequent changes. Overall, it makes for a leaner map with less excess data. But most of all, as IDs and segments change less over time, the map is much more stable, and much friendlier for consumers and developers at commercial enterprises to work with.
“The goal of sectioning a road like this is to create stability. For the transportation layer it’s super important at a base level that segment IDs stay as stable as possible over time, so attributes linked to a segment don’t need to be recalculated,” Clarysse says. Recalculating segments takes a lot of time and energy that detracts from more valuable development work.
OSM’s model is great for allowing many people to edit the map and track version histories, but in commercial settings it leads to a map made up of lots of excess data and instability. TomTom’s method for the Overture transportation layer is lean, reliable, consistent and scalable.
With this guarantee of stability and this method of sectioning it makes it much easier for developers to take Overture’s transportation layer and apply their own data to it. The beauty of sectioning roads using linear referencing means the underlying segment of road only needs to be adjusted when the road’s location, size or layout changes, which isn’t as often as you’d think.
Where next for Overture’s transportation layer?
Clarysse and his colleagues are doing a vital job for the Overture Maps Foundation. Road networks are what most of us think of when we think of maps and are a crucial part of the puzzle for any company that wants to build with location data and maps, but it’s just the beginning for his team.
“There’s a lot of open data in the world that we can bring together, standardize in this way and release under Overture,” Clarysse explains.
“We have started with roads, but as we take data from open data sources, we are working to add pedestrian walkways in the upcoming releases. This will further increase the Overture transportation layer’s completeness, which is a big focus for us going forward.”
If you want to see and try and benefit from Overture’s transportation layer for yourself, check the latest release here.
And if you want to hear more about how TomTom and Overture are working together, we’ll be discussing this very topic in a panel at CES2024, or book at meeting and talk to us one to one.
Additional credit goes to Siavash Shakeri, Maps Product Manager, for information, detail, and resources.